Bra podcast
Sveriges mest populära poddar
ep.213: Physics-Based Optimization for Robot Control, with Emo Todorov
N/A •
23 juli 2016
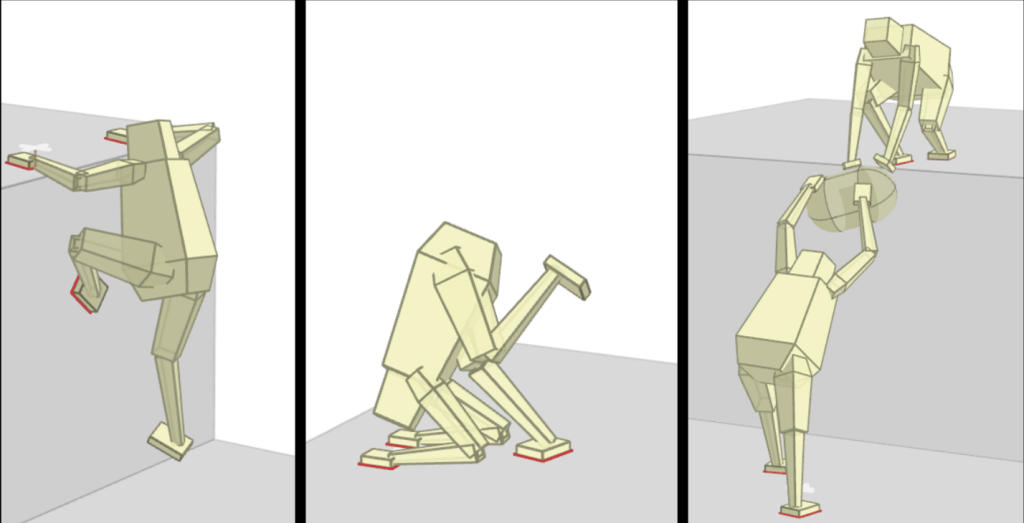
In this episode, Audrow Nash interviews Emo Todorov, Director of Movement Control Laboratory at the University of Washington, about a physics-based optimization method for controlling robots. Todorov describes how his physics-based method can be used to solve problems and discusses results in simulation and on hardware.
Kategorier
Förekommer på
00:00
-00:00